Технологии кодирования, применяемые в ЦСПАЛ
В ЦСПАЛ необходимо добиться компромисса между линейной скоростью, определяющей допустимую длину уплотняемой АЛ, и числом дополнительных каналов, образуемых на линии. С целью достижения такого компромисса разработаны методы кодирования, требующие меньших линейных скоростей для передачи одного телефонного канала.
Значения параметров квантования в цифровых системах передачи (D - диапазон квантования, h - шаг квантования, О - начало отсчета шкалы квантования, Т - временной интервал между отсчетами) выбираются, исходя из свойств преобразуемого сигнала. Диапазон D определяется динамическим диапазоном входного сигнала, шаг h - изменением величины отсчетов (их законом распределения), уровень О - средним значением сигнала, интервал Т -скоростью изменения сигнала во времени с учетом спектральных свойств сигнала.
Если систему передачи рассчитывать на наихудшие условия, то величины D и О необходимо выбрать исходя из максимальной дисперсии и разброса постоянной составляющей преобразуемого сигнала, h - выбрать наименьшим, а Т - исходя из максимальной эффективной ширины спектра. При таком проектировании системы входной сигнал будет передан и восстановлен на приеме максимально точно, но это потребует передачи больших и избыточных объемов дискретных данных. Если при проектировании минимизировать объемы передаваемых дискретных данных, то восстановленный на приеме сигнал будет неточен.
Тип ИКМ, в которой в соответствии с изменениями преобразуемого сигнала регулируются параметры квантования, называется адаптивной - АИКМ. При этом анализируются характеристики сигнала с целью осуществления регулировки величины параметров квантования. Если используется такой алгоритм регулировки, что текущий нулевой уровень шкалы квантования выбирается равным предшествующему отсчету, умноженному на некоторый коэффициент, то такую АИКМ называют дифференциальной - АДИКМ. В цифровых системах передачи для абонентских линий такой вид модуляции, стандартизированный ITU-T в Рекомендации G.726 [20], широко применяется.
отсчеты делаются через 125 мкс).
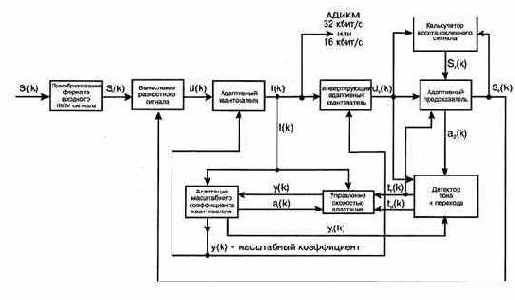
Рис. 2.11. Структурная схема кодера АДИКМ
После преобразования формата входного сигнала S(k) в сигнал линейной ИКМ S1(k) блок вычисления разностного сигнала вычисляет разностный сигнал d(k) путем вычитания сигнала оценки Se(k) из сигнала линейной ИКМ S1(k) в соответствии со следующим выражением [20]:
d(k) = S1(k) -Se(k).
Нелинейный 15- или 4-уровневый адаптивный квантователь квантует разностный сигнал d(k). До квантования сигнал d(k) преобразуется в логарифмическое представление по основанию 2 и масштабируется сигналом y(k), который вычисляется в блоке адаптации масштабного коэффициента. Нормализованные входные/выходные характеристики (абсолютно точные значения) квантователя представлены в табл. 2.3 и 2.4.
Для скорости 32 кбит/с квантованный уровень d(k) определяется четырьмя двоичными разрядами (3 разряда для амплитуды и 1 для знака). Адаптивный квантователь формирует 4-разрядный выходной сигнал l(k), который является выходом АДИКМ на 32 кбит/с. Сигнал l(k)=0000 из-за ошибок передачи является разрешенным состоянием на входе этих блоков в декодере. Сигнал l(k) также поступает в инвертирующий адаптивный квантователь, в блок управления скоростью адаптации и в блок адаптации масштабного коэффициента квантователя.
Таблица 2.3, Нормализованные характеристики входа/выхода квантователя для работы
на скорости 32 кбит/с
|
Диапазон входного сигнала |
|l(k)| |
Выходной сигнал |
|
log2|d(k)| -y(k) |
log2|dq(k)| -y(k) |
|
|
[3.12...+Г) |
7 |
3,32 |
|
[2,72:. .3,12) |
6 |
2,91 |
|
[2,34.. .2,72) |
5 |
2,52 |
|
[1,01. ..2,34) |
4 |
2,13 |
|
[1,38.. .1,91) |
3 |
1,66 |
|
[0,62.. .1,38) |
2 |
1,05 |
|
[-0,98. ..0,62) |
1 |
0,031 |
|
(-Г.. .-0,98) |
0 |
-Г |
Таблица 2.4. Нормализованные характеристики входа/выхода квантователя для работы с
сигналами со скоростью передачи 16 кбит/с
|
Диапазон входного сигнала |
|l(k)| |
Выходной сигнал |
|
log2|d(k)| -y(k) |
log2|dq(k)| -y(k) |
|
|
[2,04.. .+Г) |
0 |
2,85 |
|
(-Г.. .-2,04) |
1 |
0,91 |
Квантованная версия dq(k) разностного сигнала получается при масштабировании, используя y(k), определенные значения которого выбираются из нормализованных характеристик, представленных в табл. 2.3 и 2.4, и затем преобразуются из логарифмического представления.
Блок адаптации масштабного коэффициента квантователя вычисляет величину y(k), которая является масштабным коэффициентом для квантователя и инвертирующего квантователя. На входы блока поступают 4-разрядный или 2-разрядный выходной сигнал квантователя 1(к) и параметр управления скоростью адаптации a1k).
Основным принципом масштабирования является бимодальная (двухскоростная) адаптация, при этом:
• быстрая адаптация используется для сигналов (например, речевых), образующих разностный сигнал с большими флуктуациями (колебаниями);
• медленная адаптация используется для сигналов (например, данных, передаваемых в
диапазоне тональных частот), образующих разностный сигнал с малыми флуктуациями
(колебаниями).
• Комбинация быстрого и медленного коэффициентов масштабирования управляет скоростью адаптации.
Быстрый (нефиксированный) масштабный коэффициент yu(k) рекурсивно вычисляется в логарифмическом представлении по основанию 2, используя результирующий логарифмический масштабный коэффициент y(k), следующим образом:
yu(k)=(1-2-5) y(k) + 2-5 W[l(k)],
где yu(k) находится в пределах 1,06? yu(k) ? 10,00.
Для АДИКМ со скоростями 32 кбит/с и 16 кбит/с дискретная функция W(l) имеет следующие значения (абсолютно точные величины), которые приведены в табл. 2.5.
Таблица 2.5. Значения W(l) для АДИКМ
|
Скорость, кбит/с |
32 |
16 |
||||||||
|
|l(k)| |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
1 |
0 |
|
W[l(k)] |
70,1 |
22,1 |
12,3 |
7,00 |
4,00 |
2,56 |
1,13 |
-0,75 |
27,4 |
-1,38 |
Медленный (фиксированный) масштабный коэффициент y1(k) получается из yu(k) с помощью операции фильтрации нижних частот:
y1(k) =(1-2-6) y1(k-1)+ 2-6 yu(k)
Затем быстрый и медленный масштабные коэффициенты объединяются для формирования результирующего масштабного коэффициента:
y(k)= a1(k) yu(k-1)+[1 -a1(k)] y1(k-1)
где a1(k) - управляющий параметр.
Предполагается, что управляющий параметр a1(k) может принимать значения в диапазоне (0, 1). Для речевых сигналов он стремится к единице, а в диапазоне тональных частот и одночастотных сигналов он стремится к нулю. Этот параметр определяется мерой скорости изменения разностного сигнала. При этом вычисляются две меры средней величины l(k) в соответствии со следующими выражениями:
dms(k)= (1-2-5) dms(k-1)+2-5 F[l(k)], dml(k)= (1-2-7) dms(k-1)+ 2-7 F[l(k)].
Значения F[l(k)] для скоростей 32 кбит/с и 16 кбит/с определяются из соотношений, приведенных в табл. 2.6.
Таблица 2.6. Значения F[l(k)]
|
Скорость, кбит/с |
32 |
16 |
||||||||
|
|l(k)| |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
1 |
0 |
|
F[l(k)] |
7 |
3 |
1 |
1 |
1 |
0 |
0 |
0 |
7 |
0 |
Используя эти два средних значения, определяется переменная ap(k) при следующих соотношениях:
ap(k)=(1-2-4) ap(k-1)+2-3 , если y(k)<3; |dms(k)-dml(k)|?2-3dml(k); td(k)=1
Величина ap(k) = 1, если tr(k) = 1 , в противном случае ap(k) = (1 – 2-4) ap(k - 1).
Таким образом, ap(k) стремится к значению 2, если разность между dms(k) и dm; (k) большая (среднее значение l(k) быстро меняется); ap(k) стремится к нулевому значению, если разность мала (среднее значение амплитуды l(k) относительно постоянно). Величина ap(k) также стремится к значению 2 при свободном ("холостом") канале, признаком которого служит соотношение y(k)<3) или для сигналов с ограниченной полосой частот (признаком служит соотношение td(k)=1). Заметим, что ap(k) устанавливается в состояние 1 после обнаружения перехода сигнала с ограниченной полосой частот (признаком служит соотношение tr(k)=1). Затем ap(k - 1) ограничивается до ar(k) (см. выражение, приведенное выше).
Таким образом, a1(k) равно: 1 при ap(k - 1)>1, или ap(k - 1) при ap(k - 1) < 1.
В результате чего имеется задержка начала перехода из быстрого состояния в медленное до тех пор, пока абсолютная величина l(k) остается постоянной в течении некоторого времени. Это позволяет устранить преждевременные переходы для импульсных входных сигналов, например, таких, как данные, передаваемые в диапазоне тональных частот с прерыванием несущей. Основная функция адаптивного предсказателя состоит в вычислении сигнала оценки se(k) из квантованного разностного сигнала dq(k). Две структуры используются в адаптивном предсказателе: каскад 6-го порядка, который моделирует нули, и каскад 2-го порядка, который моделирует единичные значения, в выходном сигнале. Эти две структуры эффективно применяются для множества разнообразных входных сигналов.
Для улучшения рабочих характеристик некоторых сигналов, например, от модемов с частотной манипуляцией (с фиксированным сдвигом частоты - FSK), которые работают в символьном режиме, установлен двухшаговый режим детектирования. Первоначально осуществляется детектирование сигнала с ограниченной полосой частот (например, одночастотный сигнал - тон), чтобы перевести квантователь в быстрый режим адаптации, при этом td(k)=1, если a2(k) < -0,71875, или td(k) = 0, в противном случае.
Переход от сигнала с ограниченной полосой частот к другому сигналу происходит так: коэффициенты предсказателя устанавливаются в нулевое значение и квантователь ускоренно переходит в быстрый режим адаптации: tr(k)=1, если a2(k) < -0,71875 и |dq(k)| > 24*2у1(k), и t(k)=0,- в противном случае.
Блоки декодера (рис. 2.12) функционируют соответственно вышеописанному.